Navisys Technology Corp. 2015/07 GPSサポート

Microsoftストアアプリ、ブラウザのGoogle Map、Windows地図など位置センサーを利用したアプリケーションで利用できます。(Windows8/8.1/10)
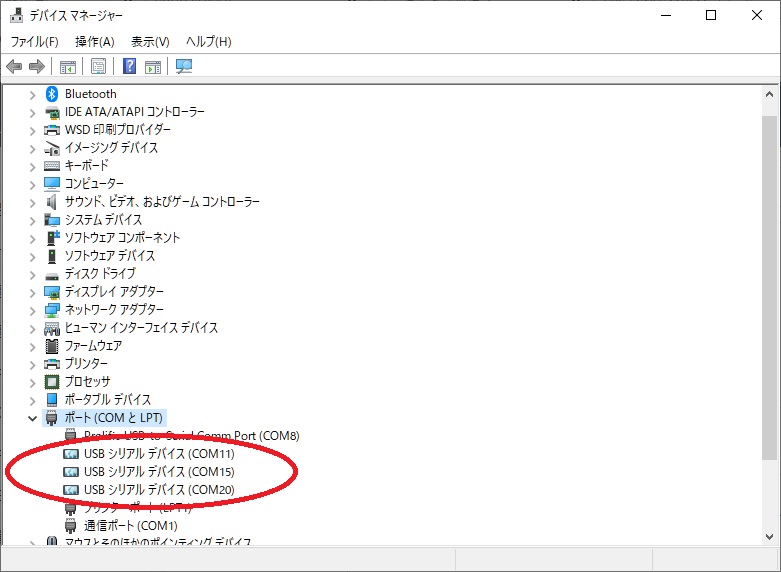
「仮想COMポート」経由ではWindows OSのUSBシリアルドライバーでセットアップを行います。
GPS GLONASS QZSS SBAS GNSSの選択、MSG、NMEATalker、転送レート、更新周期、など設定が可能です。
GR-8013U USBインターフェイス
| GPS |
u-blox GNSS high performance GPS Module M8M
|
| 受信方式 |
72チャンネル
|
| 加速度 |
<=4g
|
| 高度 |
50,000m limit
|
| 速度 |
515m/秒 1,852Km/hr limit
|
| 正確度 |
速度 0.05m/秒 方位 0.3度
|
| 受信周波数 |
GPS/QZSS L1C/A, GLONASS L1 OF, SBAS L1 C/A
|
| 受信感度 |
-167dBm(Tracking)
|
| 位置精度 |
2.5m (単独) 2.5m(単独GPS&GLONASS)
|
| 更新レート |
1-18Hz(GPS) 1-10Hz(GPS&GLONASS)ROM
|
| TTFF |
26秒 Cold 1.5秒 Hot
|
| 出力メッセージ |
NMEA 0183v4 (2.3/4.x), UBX ,RTCM2.3 1,2,3,9
|
| ボーレート |
9600bps default
|
| 電源電圧 |
DC3.3-5.5V (40mA 標準)USB2.0
|
| 本体サイズ |
40mm x 45㎜ x16mm
|
| ケーブル |
USB Type A 1.5-1.54m
|
| インターフェイス |
USB(Windows USB serial Driver)/Sensor(u-blox GNSS Sensor Device Driver for Windows)
|
| ストレージ温度 |
-40℃~85℃
|
| バッテリ温度 |
-20℃~60℃
|
| 湿度 |
95%(結露しない)
|
| 防水 |
IPX7
|
| Certification |
RoHS
|
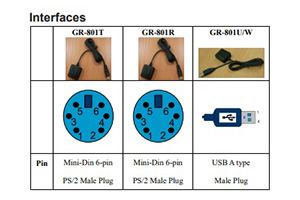
| USB A Type |
Pin 1 Vin Pin2,3 USB IF Pin4 GND
|
| LED Color |
LED(赤) ON 探索中 LED(赤)点滅 捕捉完了
|



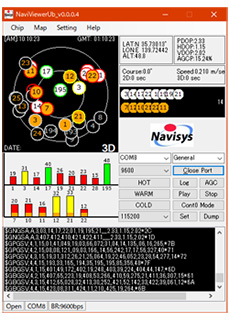
ダウンロード(NaviViewerUb_v0.0.1.0_20200401.zip)後に展開(解凍)しNaviViewerUV_v0.0.1.0.exeを実行します。
COMポート(USBシリアルデバイス COMxx)、ボーレート9600bpsを選択しOpen Portをクリックします
u-center 21.0.5
├── File
├── Edit
├── View
├── Packet Console
├── Binary Console
├── Text Console
├── Message View
├── Configuration View
├── (Generation 9 Configuration View)
├── Statics View
├── Table View
├── Recent Table View
├── Chart View
├── Recent Chart View
├── Histgram View
├── Recent Histgram View
├── (GNSS Driver View)
├── Map View
├── Recent Static Map View
├── Camera View
├── Daviation Map
├── Sky View
├── Docking Windows
└── Toolbars
├── Player
├── Reciver
├── Connection
├── Baudrate
├── Tools
├── Windows
└── Help
├── Configuration View
├── ANT(Antena Setting)
├── BATCH
├── CFG(Configuration)
| └── Revert to last saved configuration
| └── Revert all but ANT default configuration
| └── Revert default configuration 工場出荷状態に戻す
| └── Save current configuration 変更を保存
| └── User defined configuration
│
├── DAT(Datum)
| └── WGS84
├── DGNSS (Differential GNSS configuration)
| └── 3=RTK fixed: Ambiguities are fixed whenever possible.
├── DOSC(Disciplined Oscilator)-
├── EKF(EKF Setting)
├── ESFA(Accelerometer Config)
├── ESFALG(IMU-mount Alignment)
├── ESFG(Gyroscope Config)
├── ESFGWT(Gyro+Wheeltick)
├── ESWT(IMU-mount Alignment)
├── ESRC(IMU-mount Alignment)
├── FXN(Fix Now Mode)
├── GEOFENCE(Geofence Config)
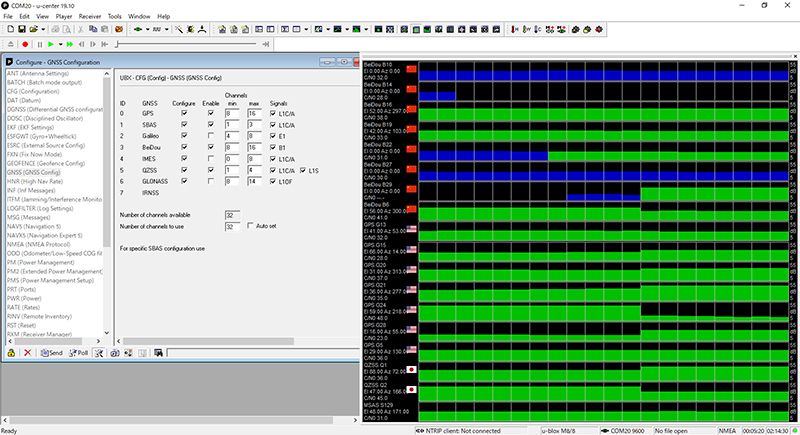
├── GNSS(GNSS Config)
| └── GPS 有効/無効
| └── SBAS 有効/無効
| └── Galileo
| └── BeiDou 選択 有効/無効
| └── IMES
| └── QZSS 有効/無効
| └── GLONASS選択 有効/無効
| └── IRNASS
├── HNR(High Nav Rate)
├── INF(Inf Messages)
├── ITFM(Jamming/Interference Monitor)
├── LOGFILTER(Log Setting)
├── MSG(Messages)
| └── F0-00 NMEA GxGGA
| └── F0-01 NMEA GxGLL
| └── F0-02 NMEA GxGSA
| └── F0-03 NMEA GxGSV
| └── F0-04 NMEA GxRMC
| └── F0-05 NMEA GxVTG
| └── F0-06 NMEA GxGRS
| └── F0-07 NMEA GxGST
| └── F0-08 NMEA GxZDA
| └── F0-09 NMEA GxGBS
| └── F0-0A NMEA GxDTM
| └── F0-0D NMEA GxGNS
| └── F0-0E NMEA GxTHS
| └── F0-0F NMEA GxVLW
| └── F1-00 NMEA PUBX00
├── NAV5(Navigation 5)
| └── Navigation Modes
| | └── Dynamic Model
| | └── Fix Mode
| | └── UTC Standard
| └── Navigation Input filters
| └── Navigation output filters
├── NAVX5(Navigation Expert 5)
| └── Navigation Input Filters
| └── Miscellaneous
| | └── GPS Week rollover(1867 20151018-20350602/ 1936 20170212-20360927)
| └── AssistNow Autonomous
| └── ADR/UDR
| └── Sugnal Atenuaton Compensation
├── NMEA(NMEA Protocol)
| └── CFG-NMEA-DATA2
| | └── Filters
| | └── NMEA Version
| | | └── 2.1/2.3/4.0/4.10/4.11
| | └── Max SVs per Talker Id
| | └── Mode Flags
| | | └── Conmatibility/Consider/Stict limit 82ch max
| | | /High precision mode
| | └── GNSS to filter out
| | └── Numberring used for SVs not supported by NMEA 0/1 3digit
| | └── Main Talker ID 0/1 2-5
| | └── GSV Talker ID 0
| | └── BeiDou Talker ID
├── ODO(Odometer/Low0speed COG filter)
├── PM(Power Management)
├── PM2(Extend Power Management)
├── PMS(Power Management Setup)
├── PRT(Ports)
| └── Target 1 UART1
| └── Protocol in 0+1+2 UBX NMEA RTCM2
| └── Protocol out 0+1 UBX NMEA
| └── Baudrate 4800-921600
| └── Databits
| └── Stopbits
| └── Parity
| └── Bit Order
├── PWR(Power)
├── RATE(Rates)
| └── Time Source 1 GPS time
| └── Measurement Period 1000[ms]
| └── (Measurement Frequency 1.0[Hz])
| └── (Navigation Rate 1[cyc])
| └── (Navigation Frequency 1.0[Hz])
├── RINV(Remote Inventory)
├── RST(Reset)
├── RXM(Receiver Manager)
├── SBAS(SBAS Settings)
| └── Subsystem Enabled
| └── Services
| └── Number of search channels 3
| └── PRN Codes Other 120,123,127-192,133,135-138
├── SENIF(Sensor Interface)
├── SLAS(SLAS settings)
├── SMGR(Sync Manager Config)
├── SPT(Sensor Production Test Config)
├── TMODE(Time Mode)
├── TMODE(Time Mode)
├── TMODE(Time Mode)
├── TP(Time Mode)
├── TP5(Time Mode)
├── TXSLOT(Time Mode)
├── USB(Time Mode)
├── VALDEL(Time Mode)
├── VALGET(Time Mode)
└── VALSET(Time Mode)
※u-center ver21.05 Generation M8のConfiguration項目を表示してあります。カスタマイズ可能な箇所は展開し選択項目を表示してあります。USB COMポートでの接続
詳細はドキュメントUBX-13003221 (関連UBX-15028330)などをご参照下さい。