Navisys Technology Corp.

日本語マニュアル保証書
u-blox7チップ、GPS QZSS SBAS/or GLONASS 受信 56ch
USBインターフェイスで接続し(PL-2303)USB DCD 1ppsを出力します(Data Career Detect))
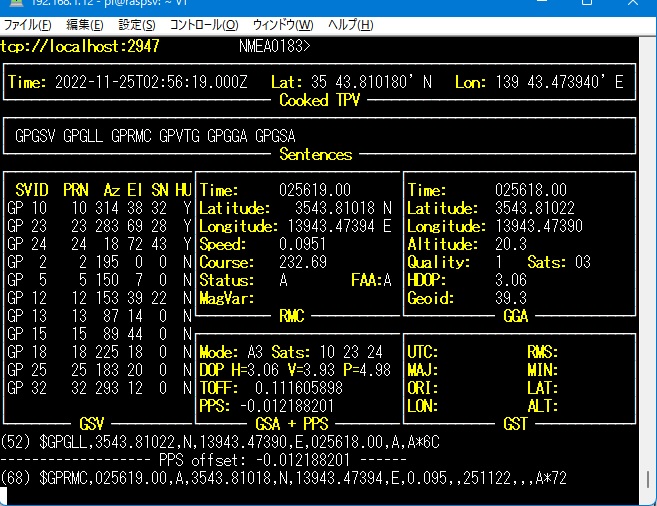
GPSD Time Service, Tac32 等
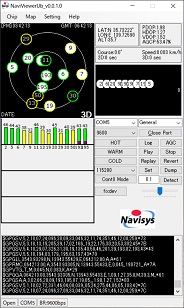
GPS/QZSS/SBAS or GLONASS 受信
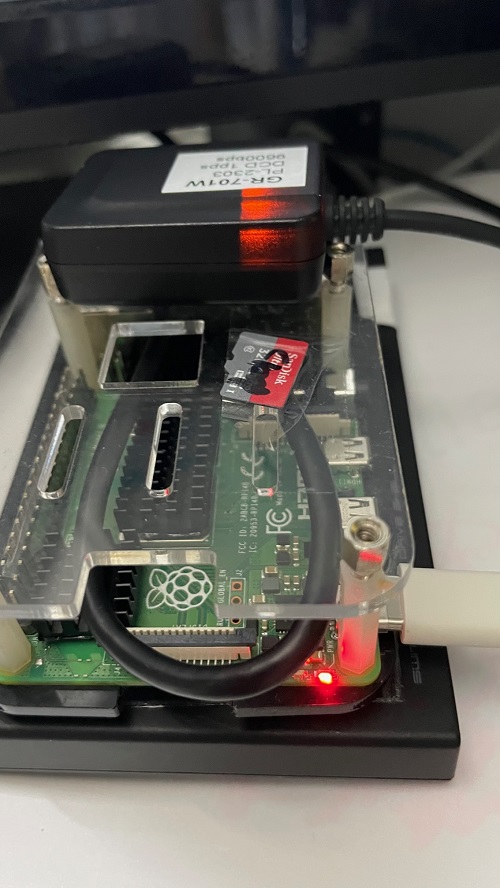
GR-701W USB USB DCD 1pps出力
| GPS |
u-blox7
|
| 受信方式 |
56ch
|
| 周波数 |
GPS QZSS L1,1575.42MHz / GLONASS 1598.0625~1605.375MHzSBAS:WAAS,EGNOS,MSAS
|
| 受信感度 |
-162dBm(測位時) -148dBm(探索)
|
| TTFF |
1秒/28秒/30秒(Hot/Warm/Cold 平均)
|
| 再補足 |
0.1秒 平均
|
| 位置精度 |
2.0m(WAAS/SBAS有効時)CEP 50% 24hr static -130dBm
|
| 速度精度 |
<0.1m/秒 <0.5° (50%@30m/s)
|
| PPS |
RMS:30ns(GPS) 99%:60ns(GPS)
|
| 時間精度 |
1μ秒 平均
|
| 加速度 |
<4G
|
| 高度 |
18,000m
|
| 速度 |
1,852Km/h
|
| Protocol |
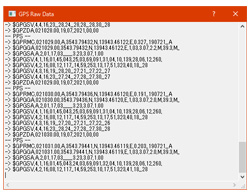
NMEA 0183V2.3-3.0 UART:9600(default) N,8,1;GGA, GLL, GSA, GSV, RMC, VTG, TXT
|
| 更新周期 |
1Hz 最大10Hz
|
| 電源電圧 |
3.3-5.5VDC 37mATTL
|
| サイズ |
36(W) x 42(L) x 15(H) mm)
|
| ケーブル |
1.5m
|
| インターフェイス |
USB TypeA
|
| 動作温度 |
-40℃~85℃
|
| ストレージ温度 |
-40℃~85℃
|
| 湿度 |
95%(結露しない)
|
| 防水 |
IPX7
|
| Certification |
EMC:CE/FCC RoHS
|
| USB TypeA |
Pin1 VCC5V Pin2 D- Pin3 D+ Pin4 GND
|
| LED Color |
LED ON 探索中 LED点滅 捕捉完了
|
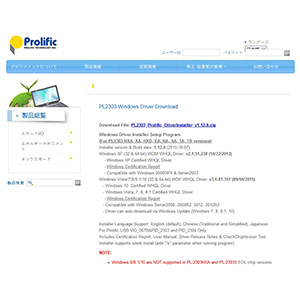
GR-701Wはubloxセンサードライバーをサポートしていません。

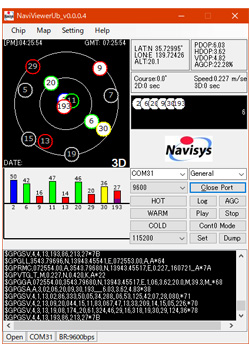
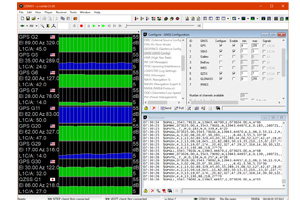
u-center
├── File
├── Edit
├── View
├── Packet Console
├── Binary Console
├── Text Console
├── Message View
├── Configuration View
├── (Generation 9 Configuration View)
├── Statics View
├── Table View
├── Recent Table View
├── Chart View
├── Recent Chart View
├── Histgram View
├── Recent Histgram View
├── (GNSS Driver View)
├── Map View
├── Recent Static Map View
├── Camera View
├── Daviation Map
├── Sky View
├── Docking Windows
└── Toolbars
├── Player
├── Reciver
├── Connection
├── Baudrate
├── Tools
├── Windows
└── Help
├── Configuration View
├── ANT(Antena Setting)
├── BATCH
├── CFG(Configuration)
| └── Revert to last saved configuration
| └── Revert all but ANT default configuration
| └── Revert default configuration 工場出荷状態に戻す
| └── Save current configuration 変更を保存
| └── User defined configuration
│
├── DAT(Datum)
| └── WGS84
├── DGNSS (Differential GNSS configuration)
| └── 3=RTK fixed: Ambiguities are fixed whenever possible.
├── DOSC(Disciplined Oscilator)-
├── EKF(EKF Setting)
├── ESFA(Accelerometer Config)
├── ESFALG(IMU-mount Alignment)
├── ESFG(Gyroscope Config)
├── ESFGWT(Gyro+Wheeltick)
├── ESWT(IMU-mount Alignment)
├── ESRC(IMU-mount Alignment)
├── FXN(Fix Now Mode)
├── GEOFENCE(Geofence Config)
├── GNSS(GNSS Config)
| └── GPS 有効/無効
| └── SBAS 有効/無効
|
| └── QZSS 有効/無効
| └── GLONASS選択 有効の場合は他を受信できません。
|
├── HNR(High Nav Rate)
├── INF(Inf Messages)
├── ITFM(Jamming/Interference Monitor)
├── LOGFILTER(Log Setting)
├── MSG(Messages)
| └── F0-00 NMEA GxGGA
| └── F0-01 NMEA GxGLL
| └── F0-02 NMEA GxGSA
| └── F0-03 NMEA GxGSV
| └── F0-04 NMEA GxRMC
| └── F0-05 NMEA GxVTG
| └── F0-06 NMEA GxGRS
| └── F0-07 NMEA GxGST
| └── F0-08 NMEA GxZDA
| └── F0-09 NMEA GxGBS
| └── F0-0A NMEA GxDTM
| └── F0-0D NMEA GxGNS
| └── F0-0E NMEA GxTHS
| └── F0-0F NMEA GxVLW
| └── F1-00 NMEA PUBX00
├── NAV5(Navigation 5)
| └── Navigation Modes
| | └── Dynamic Model
| | └── Fix Mode
| | └── UTC Standard
| └── Navigation Input filters
| └── Navigation output filters
├── NAVX5(Navigation Expert 5)
| └── Navigation Input Filters
| └── Miscellaneous
| | └── GPS Week rollover(1867 20151018-20350602/ 1936 20170212-20360927)
| └── AssistNow Autonomous
| └── ADR/UDR
| └── Sugnal Atenuaton Compensation
├── NMEA(NMEA Protocol)
| └── CFG-NMEA-DATA2
| | └── Filters
| | └── NMEA Version
| | | └── 2.1/2.3/4.0/4.10/4.11
| | └── Max SVs per Talker Id
| | └── Mode Flags
| | | └── Conmatibility/Consider/Stict limit 82ch max
| | | /High precision mode
| | └── GNSS to filter out
| | └── Numberring used for SVs not supported by NMEA 0/1 3digit
| | └── Main Talker ID 0/1 2-5
| | └── GSV Talker ID 0
| | └── BeiDou Talker ID
├── ODO(Odometer/Low0speed COG filter)
├── PM(Power Management)
├── PM2(Extend Power Management)
├── PMS(Power Management Setup)
├── PRT(Ports)
| └── Target 1 UART1
| └── Protocol in 0+1+2 UBX NMEA RTCM2
| └── Protocol out 0+1 UBX NMEA
| └── Baudrate 4800-921600
| └── Databits
| └── Stopbits
| └── Parity
| └── Bit Order
├── PWR(Power)
├── RATE(Rates)
| └── Time Source 1 GPS time
| └── Measurement Period 1000[ms]
| └── (Measurement Frequency 1.0[Hz])
| └── (Navigation Rate 1[cyc])
| └── (Navigation Frequency 1.0[Hz])
├── RINV(Remote Inventory)
├── RST(Reset)
├── RXM(Receiver Manager)
├── SBAS(SBAS Settings)
| └── Subsystem Enabled
| └── Services
| └── Number of search channels 3
| └── PRN Codes Other 120,123,127-192,133,135-138
├── SENIF(Sensor Interface)
├── SLAS(SLAS settings)
├── SMGR(Sync Manager Config)
├── SPT(Sensor Production Test Config)
├── TMODE(Time Mode)
├── TMODE(Time Mode)
├── TMODE(Time Mode)
├── TP(Time Mode)
├── TP5(Time Mode)
├── TXSLOT(Time Mode)
├── USB(Time Mode)
├── VALDEL(Time Mode)
├── VALGET(Time Mode)
└── VALSET(Time Mode)
GPSDインストール gpsd gpsd-clients
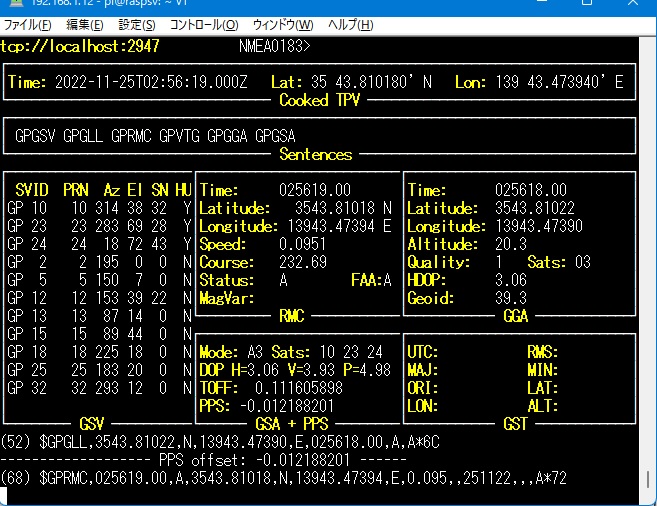
PPStoolのインストール pps-tools
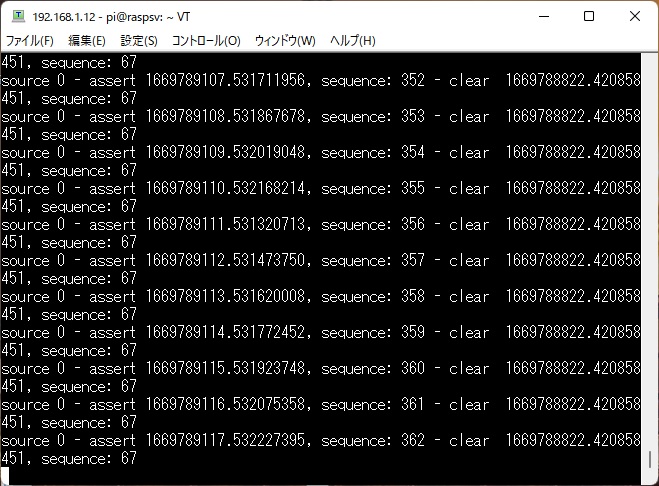
ppstest /dev/pps0
ntp インストール ntp.conf設定
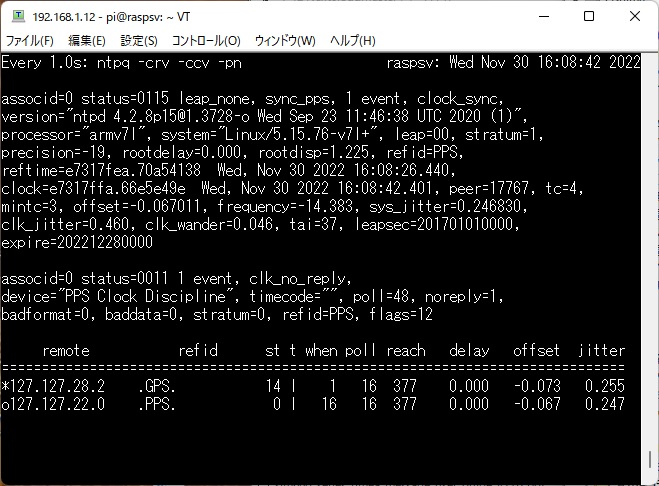
DEVICES="/dev/ttyUSB0 /dev/pps0"
server 127.127.28.2 minpoll 4 maxpoll 4 prefer
fudge 127.127.28.2 refid GPS stratum 14
server 127.127.22.0 minpoll 4 maxpoll 4
fudge 127.127.22.0 refid PPS stratum 0 flag3 1 flag4 1
調整中 pps jitter
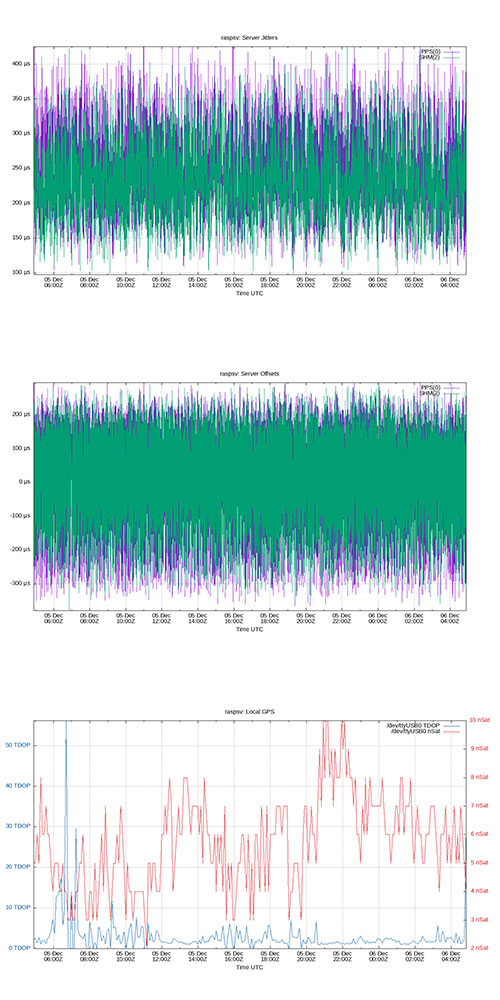
gpsdは、共有メモリ セグメント (SHM) を使用してntpdと通信します。SHM には、SHM(0) から SHM(7) までの番号が付けられています。NTP0 から NTP7 までの名前 (キー) を持ちます。
詳細はドキュメントData sheet (関連u-blox7 Command)などをご参照下さい。